
Digital cockpit integration with HERE Navigation
HERE Navigation running in Android Cuttlefish, fully integrated in a virtual vehicle, with a live instrument cluster fed by real vehicle signals - all within RemotiveTopology and ready for early integration testing.

Digital cockpit integration with HERE Navigation
HERE Navigation running in Android Cuttlefish, fully integrated in a virtual vehicle, with a live instrument cluster fed by real vehicle signals - all within RemotiveTopology and ready for early integration testing.
Digital cockpit demo summary
Navigation: HERE Navigation (APK) running in Android Cuttlefish on the central display, with real location data
Instrument cluster: Android-based cluster driven by live virtual signals - speed, RPM, indicators, warning states
3D visualisation: RemotiveTopology rendering the virtual cabin and E/E architecture from the outside
Signal source: Real CAN recordings from a drive cycle, replayed through the virtual topology
First shown: VECS2026
Experience Vehicle as Code: RemotiveTopology 30 days free trial.
"RemotiveLabs latest demo with HERE Navigation shows how vehicle software development can truly shift left and avoid last-minute integration issues caused by lack of access to physical hardware, and resulting in launches that realize the full SDV vision."

Sowmya Gopal
Head of Digital Cockpit Solutions and Virtualization, HERE Technologies
"RemotiveLabs latest demo with HERE Navigation shows how vehicle software development can truly shift left and avoid last-minute integration issues caused by lack of access to physical hardware, and resulting in launches that realize the full SDV vision."
Sowmya Gopal
Head of Digital Cockpit Solutions and Virtualization, HERE Technologies
We’re here for you – just email us with any questions you might have!
hello@remotivelabs.comEarly end-to-end integration testing of HERE Navigation, including HERE Maps and Services
Late validation is one of the most common and costly problems in vehicle development. In commercial vehicle programmes, it is worse: hardware access is constrained, certification cycles are long, and there is little margin for integration surprises. Compounding this is the structural gap between the people designing the vehicle experience (interaction designers, HMI leads, UX researchers) and the people building the infrastructure underneath it (software architects, ECU integration engineers). They work in separate environments, and they meet too late.
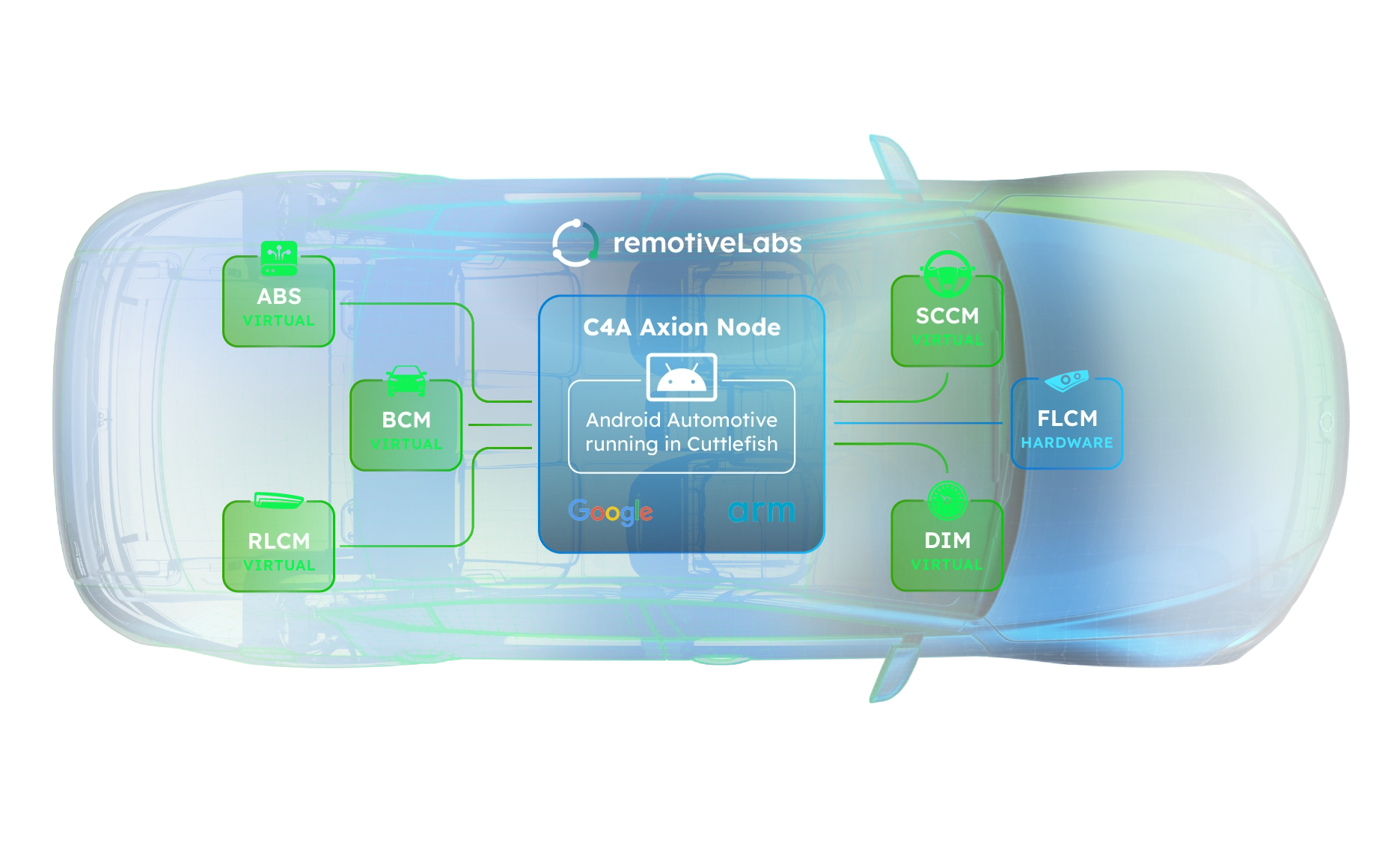
RemotiveLabs and HERE Technologies have taken a concrete next step: a working end-to-end digital cockpit, running in a fully virtual environment, that makes location intelligence and instrument cluster behaviour testable together - collaboratively and without hardware.
Validating full cockpit experiencesbefore hardware is available
RemotiveLabs, part of the HERE and AWS SDV Accelerator, contributes the enabling infrastructure layer: the foundation that makes the vehicle environment sharable, observable, and machine-readable for every team.
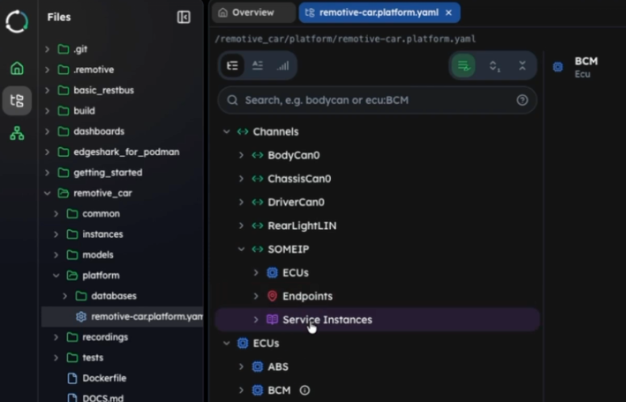
- Infrastructure as Code for SDVs: with Vehicle as Code the topology, buses, signals, ECUs all interact astext artefacts, version-controlled, reproducibe.
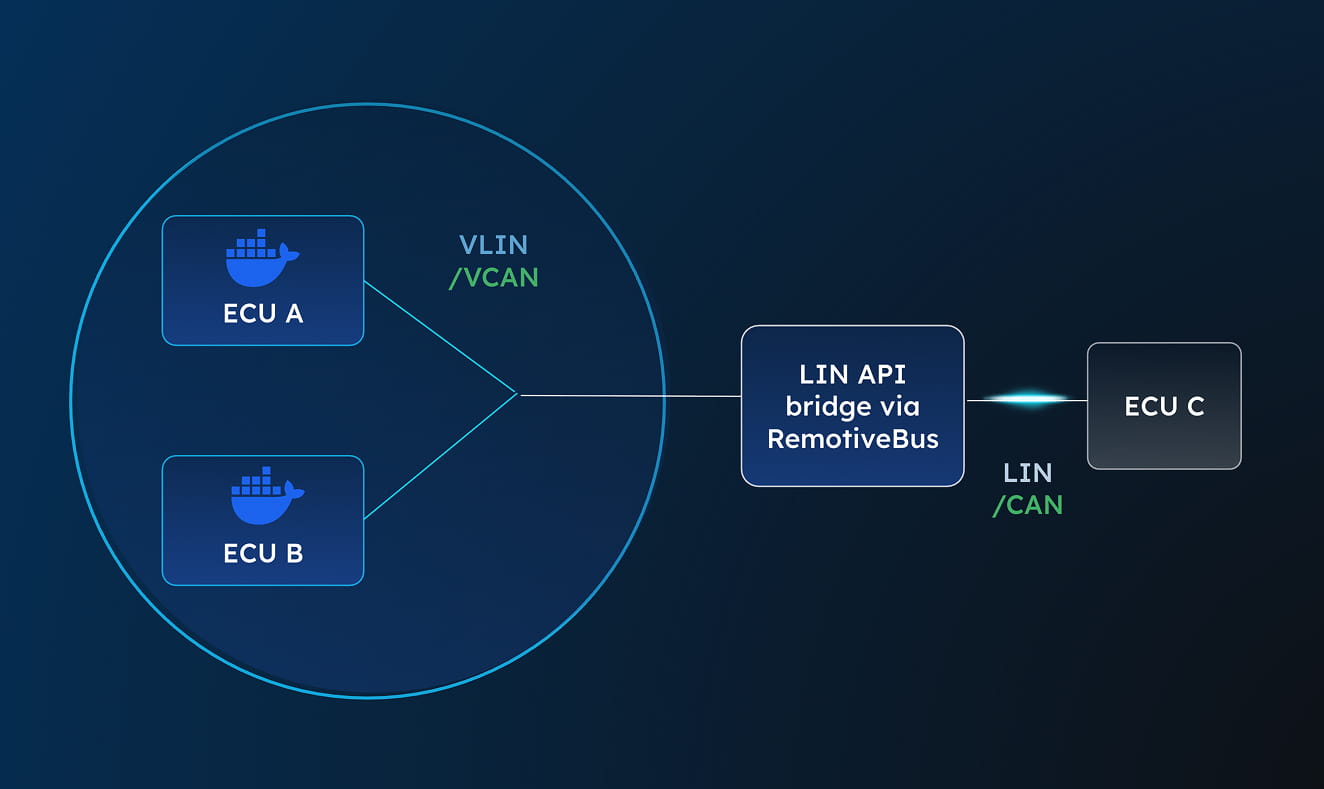
- Production communication: Real CAN, Ethernet, SOME/IP, VLANs, SecOC - same encoding as the production vehicle. Not stubs.
- Full virtualisation: No hardware dependency to start building, integrating, or testing.
- A single source of truth: One model. One reality. Queryable by every team, every tool, and every agent.
RemotiveTopology is the core of the RemotiveLabs platform, turning a vehicle's full E/E architecture - topology, buses, signals, ECUs, and communication stacks - into a modular, versioned, and queryable software model. Each node matures independently, mixing real hardware with mocks, models, and FMUs. Existing ECU software and hardware are packaged into the same structured topology, independent of provider. It is the shared playing field every team works from. A designer can change the Navigation UI and iterate on HMI design. A developer can validate user interaction flows (for example, battery alerts) against real vehicle states (for example, battery state and consumption). A test engineer can run CI against the same topology. A solutions architect can trace a signal from pedal to cluster without opening a vendor tool. Every role works against the same vehicle model, simultaneously.
- Sowmya Gopal, Head of Digital Cockpit Solutions and Virtualization, HERE Technologies
The demo: end-to-end cockpit integration
First shown at VECS 2026. HERE Navigation runs with live HERE Maps and Services on the centre display. The instrument cluster - speed, RPM, indicator states - is driven by realsignals recordings replayed through the virtual E/E architecture. The 3D cabin renders the same environment from the outside.
3D-rendered cockpit interior with live instrument cluster, HERE Navigation on the centre console, real-time CAN signal timeline, and recorded forward-camera feed - all running simultaneously in RemotiveTopology.
“One more thing” we let Claude build and integrate the instrument cluster
Once HERE Navigation was running and the virtual stack was live, we noticed the instrument cluster wasn't yet wired up. So, we handed the environment to an AI agent. Claude read the vehicle platform in RemotiveTopology, traced the signal paths, and wrote the VHAL integration: standard Vehicle Properties and OEM Vendor Properties. Four hours later, a fully working cluster was running in production AndroidAutomotive, driven by live signal traffic.

Check out the latest from us

.jpg)
.jpg)


Join the automotive rebels that #getstuffdone with RemotiveLabs!
