
RemotiveLabs showcases digital twin to accelerate next-generation automotive systems on Arm
As AI moves into the physical world across vehicles, robotics, and other autonomous systems, development models must evolve or risk becoming a bottleneck. Software development for robotics and vehicle applications is too often constrained by late hardware availability, fragmented toolchains, and limited access to realistic test environments, slowing the pace of deploying embedded AI at scale.
RemotiveLabs showcases digital twin to accelerate next-generation automotive systems on Arm
As AI moves into the physical world across vehicles, robotics, and other autonomous systems, development models must evolve or risk becoming a bottleneck. Software development for robotics and vehicle applications is too often constrained by late hardware availability, fragmented toolchains, and limited access to realistic test environments, slowing the pace of deploying embedded AI at scale.

Project: Scalable digital twin for innovation of software-defined vehicles
Programme: Vinnova – Future Mobility
Duration: November 2025 – July 2026
Lead & coordinator Remotive Labs AB (Malmö, Sweden)
Platform development (RemotiveTopology + RemotiveCloud) and test orchestration.
RemotiveLabs is part of SOAFEE.
Key partner Arm (Cambridge, UK)
Virtualized Arm-based platforms, Android Automotive enablement, integration
Supporting partners
- Volvo Cars – platform validation and onboarding
- Tooling running on the cloud platform of choice - Google Cloud platform
"Together with RemotiveLabs, we’re demonstrating how Arm-based virtual platforms enable developers to start earlier, integrate faster, and validate complex physical AI systems before hardware is available".

Suraj Gajendra
Vice President of Products and Software Solutions, Physical AI Business Unit at Arm
"Together with RemotiveLabs, we’re demonstrating how Arm-based virtual platforms enable developers to start earlier, integrate faster, and validate complex physical AI systems before hardware is available".
Suraj Gajendra
Vice President of Products and Software Solutions, Physical AI Business Unit at Arm
We’re here for you – just email us with any questions you might have!
hello@remotivelabs.comBuilding a scalable digital twin for automotive development
A new innovation project funded by Vinnova, Sweden’s innovation agency, is demonstrating a scalable digital twin approach for developing next-generation physical AI systems before physical hardware is available. Specifically, by combining virtualized Arm®-based compute with system-level simulation, it enables automotive software to be built, tested, and validated against a realistic digital twin of the vehicle and supporting environments in the cloud. Led by RemotiveLabs in collaboration with Arm and industry partners, the project shows Android Automotive running on virtualized Arm-based platforms in the cloud, reducing hardware dependencies and enabling earlier development across the vehicle lifecycle.
By combining virtualized Arm-based platforms, containerized simulation, and data-driven validation into a realistic and scalable digital twin environment, this Vinnova-funded project is solving for some of the key challenges to next-generation vehicle development. The project combines expertise in cloud-native vehicle simulation and virtualized hardware platforms by bringing together Android Automotive, cloud-based Arm computing platforms, and RemotiveLabs’ cloud-native tooling. Together this enables early testing and validation of software for complex compute systems long before physical electronic control units (ECUs) exist.One of the supporting partners include Volvo Cars, which is contributing platform validation and onboarding, and providing cloud infrastructure running on Google Cloud’s Arm-based Axion nodes.
From virtual hardware to production-ready systems
The project demonstrates a complete, end-to-end digital twin workflow for Android Automotive in a dynamic vehicle software development environment including:
- Android Automotive running on virtual Arm-based ECUs before target hardware exists
- Closed-loop and open-loop simulation using containerized vehicle topologies
- Playback of real-world drive cycles, signals, and video streams
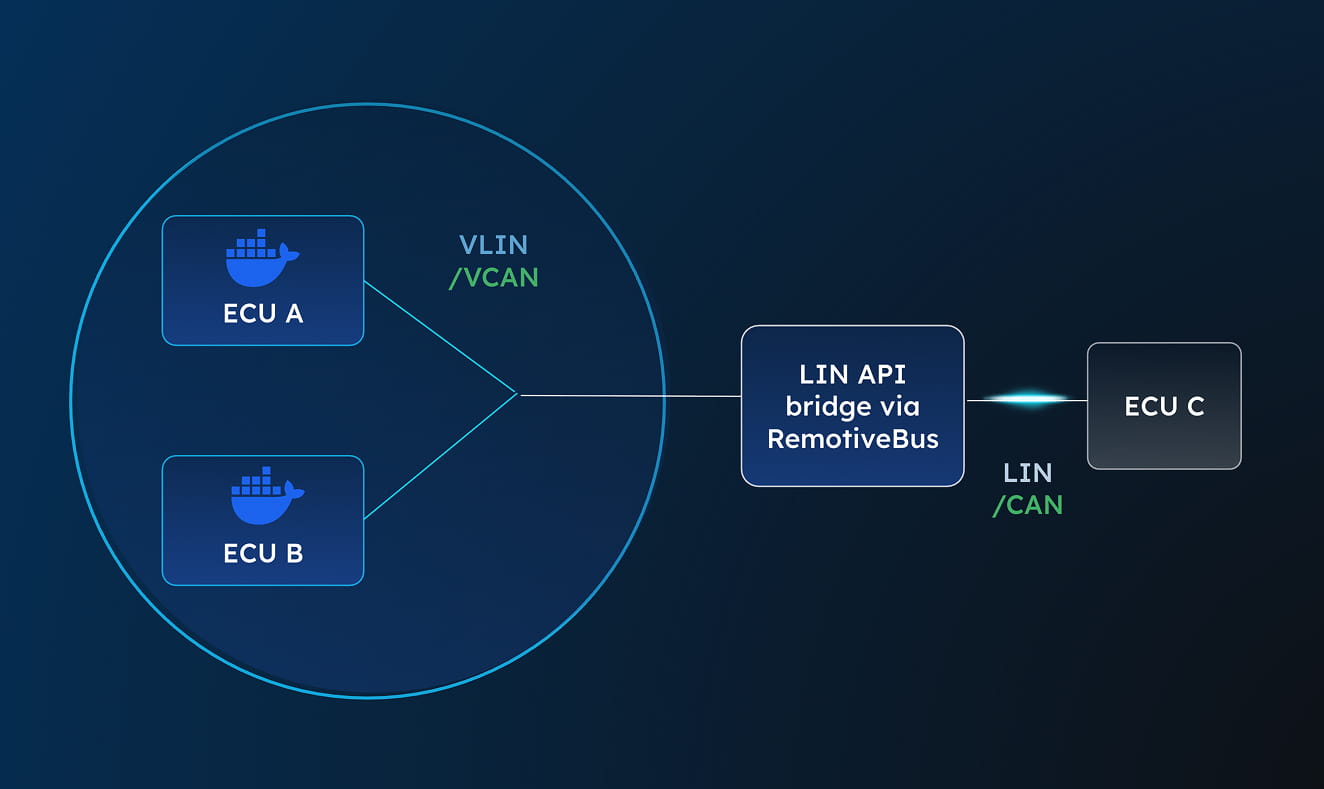
- Modular integration of hardware ECUs (e.g. IVI, ADAS, connectivity)
- Environments ready for Continuous Integration (CI) for early and continuous validation
The platform is designed to scale seamlessly - from individual developers working locally to OEM-level integration and multi-supplier collaboration in the cloud. Per Sigurdson, CEO, RemotiveLabs, says:
“Running Arm-on-Arm in the cloud makes it possible to move Android Automotive validation much earlier in the development cycle. Combined with RemotiveLabs’ system-wide approach, we enable scalable testing on realistic Arm-based hardware long before physical ECUs exist, helping teams iterate faster and collaborate earlier across the automotive software development ecosystem.
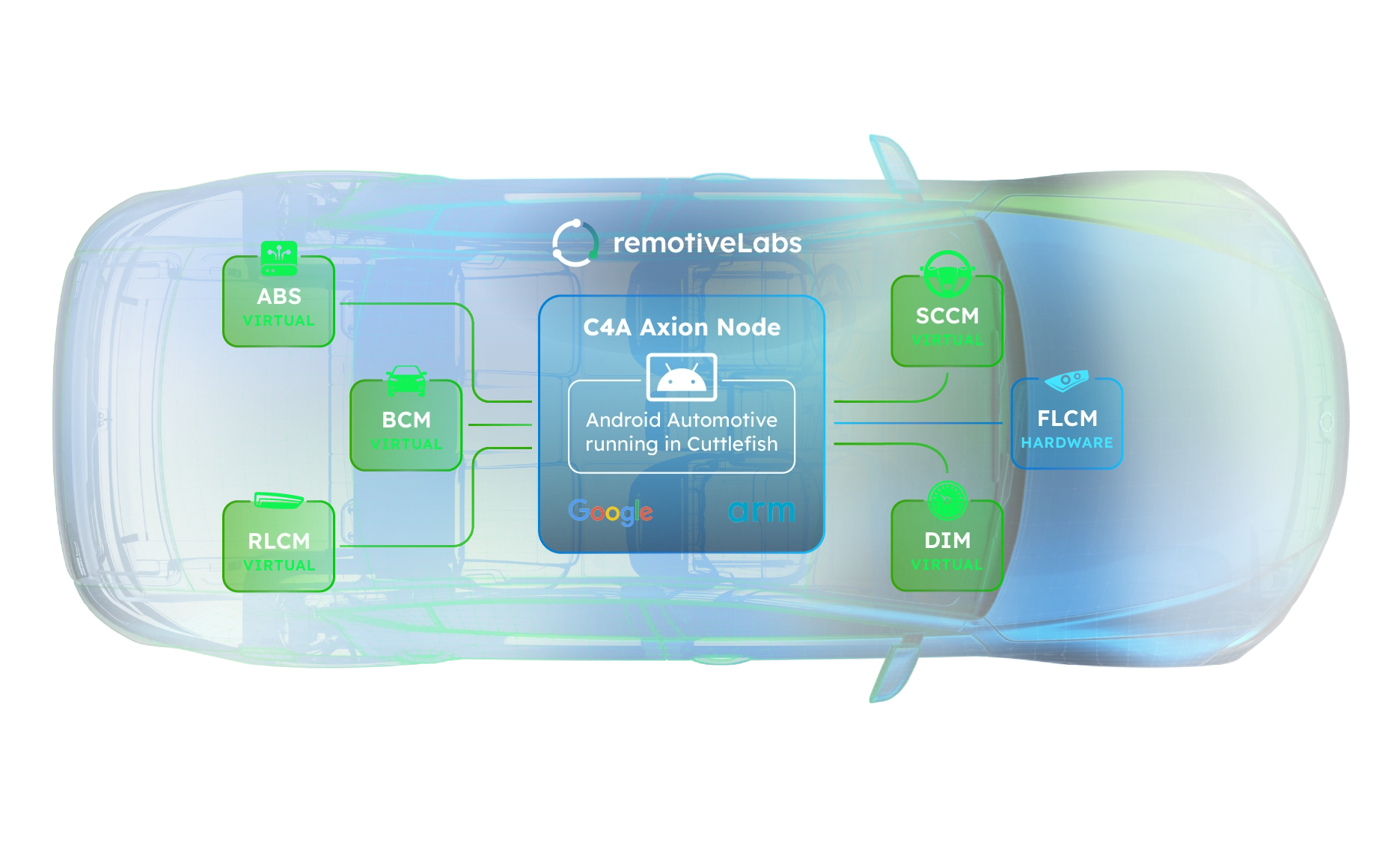
In practice, the platform runs Android Automotive on virtual Arm-based ECUs using Cuttlefish, combined with containerized vehicle simulation and real-world data playback, including HERE Maps. This allows teams to validate infotainment behavior and system interactions in an environment that closely reflects production—without waiting for physical hardware.
A system-wide approach to digital twins
Rather than building all simulation capabilities in-house, RemotiveLabs acts as the orchestration layer that connects a system-wide approach with virtual hardware, simulation models, and vehicle data into a coherent digital twin. Building on this foundation, the Arm and RemotiveLabs collaboration within the Autoware Open AD Kit End-to-End AI project demonstrates how autonomous driving software can be developed, integrated, and validated pre-silicon. Using a virtual harness and target-aware platforms, developers can test complex AI workloads in environments that reflect both the vehicle system and the compute architecture they will ultimately run on.
This modern software approach makes it possible to combine different fidelity levels - from lightweight mocks to advanced simulation models – while maintaining a consistent, developer-friendly workflow across teams, tools, and organizations.
Enabling intelligent systems with the infotainment digital twin
By enabling early validation, continuous testing, and parallel development, the project aims to significantly reduce reliance on physical prototypes, shorten development cycles, and improve software quality.
As Suraj Gajendra, Vice President of Products and Software Solutions, Physical AI Business Unit at Arm, explains:
“Automotive is at the forefront of a broader shift to physical AI, where intelligent systems must operate reliably in real-world environments at scale. This shift demands AI-defined architectures, high-performance compute, and early, continuous validation. Together with RemotiveLabs, we’re demonstrating how Arm-based virtual platforms enable developers to start earlier, integrate faster, and validate complex physical AI systems before hardware is available.”
The digital twin approach also supports more sustainable development practices by minimizing hardware iterations and enabling global collaboration without physical test setups. At the same time, it lowers barriers for third-party developers by supporting Android Automotive app development and onboarding in realistic virtual environments. Jan Hellåker, US Project Manager, Future Mobility, says:
“This project illustrates how international collaboration and virtual development can accelerate innovation in software-defined mobility. By combining Swedish platform innovation with global technology partners, it strengthens both industrial competitiveness and sustainable development.”
Public developer documentation, APIs, and onboarding assets will be produced as part of the project, making it easier for partners, developers, and researchers to build on the results. Curious readers can go to RemotiveTopology examples to explore samples including early outcomes from the project. The project also anchors Sweden–US co-innovation in software-defined mobility and lays the foundation for a multi-supplier digital twin ecosystem aligned with global SDV trends.
Check out the latest from us


.jpg)
.jpg)

Join the automotive rebels that #getstuffdone with RemotiveLabs!
