
Run virtual vehicles with real CAN logs & CSV data
Replaying real vehicle data inside a virtual setup is one of the fastest ways to understand system behaviour - and to test ideas long before hardware is available. With playback in RemotiveTopology, you can load CAN logs, CSV recordings, and synchronised video, then “drive” a virtual vehicle using signals captured from the road. It’s an easy and intuitive way to explore open-loop lightweight vehicle simulation and bring your existing datasets directly into your workflow.
Run virtual vehicles with real CAN logs & CSV data
Replaying real vehicle data inside a virtual setup is one of the fastest ways to understand system behaviour - and to test ideas long before hardware is available. With playback in RemotiveTopology, you can load CAN logs, CSV recordings, and synchronised video, then “drive” a virtual vehicle using signals captured from the road. It’s an easy and intuitive way to explore open-loop lightweight vehicle simulation and bring your existing datasets directly into your workflow.
Running recordings locally, inside a virtual vehicle
Automotive development should feel as iterative as modern software engineering. Playback in RemotiveTopology moves us closer to that ideal: you take a recording session and turn it into an active part of your topology.
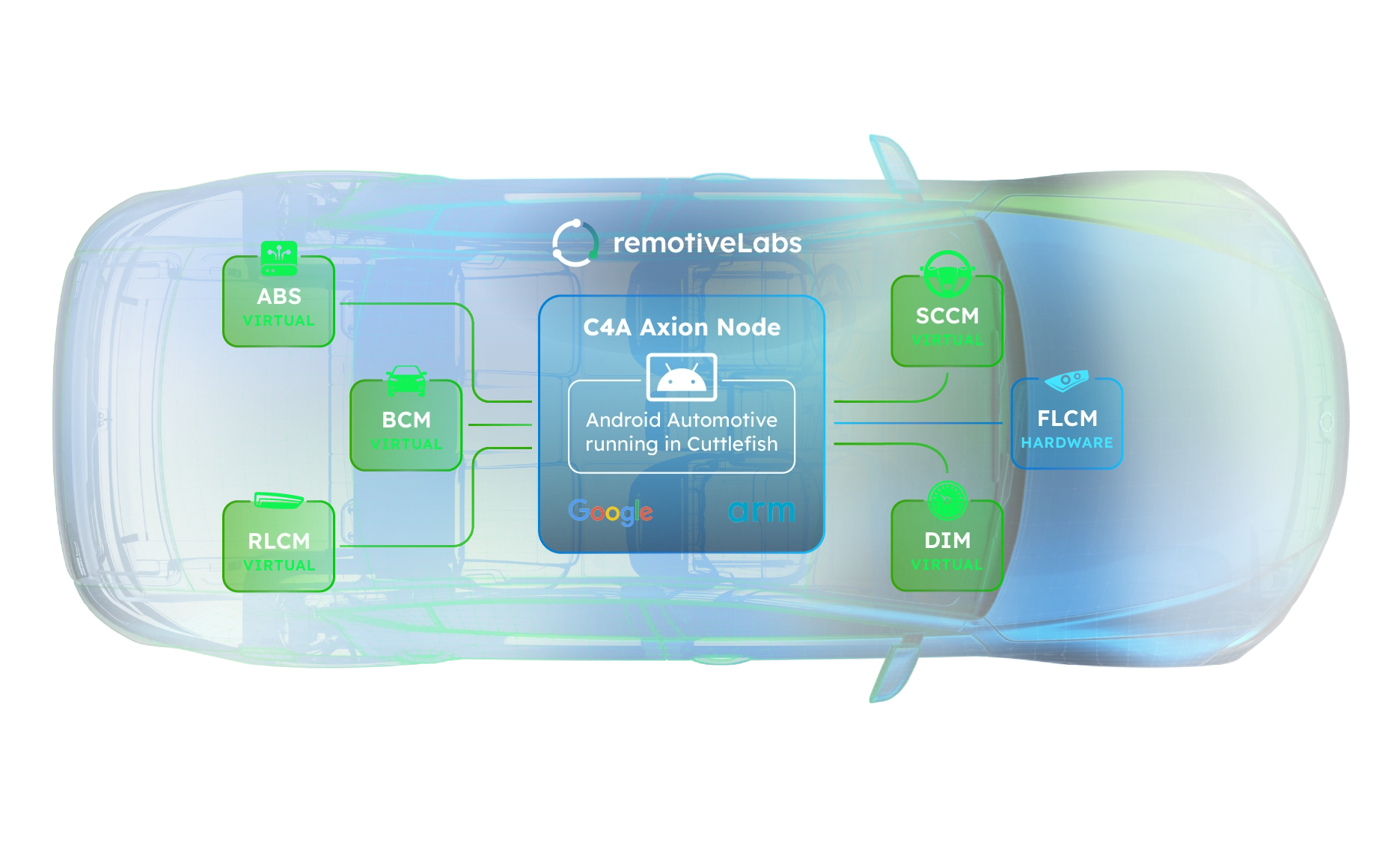
Recordings from development drives, daily test loops, edge-case captures or prototype evaluations can now do more than feed plots and dashboards. Inside a virtual vehicle, your ECUs, behavioral models, FMUs, Android Automotive stack, or UI prototypes can all respond to pre-recorded real drive data, with all components behaving as they would on-vehicle.
- Instead of manually inspecting values, your ECUs and models respond to them.
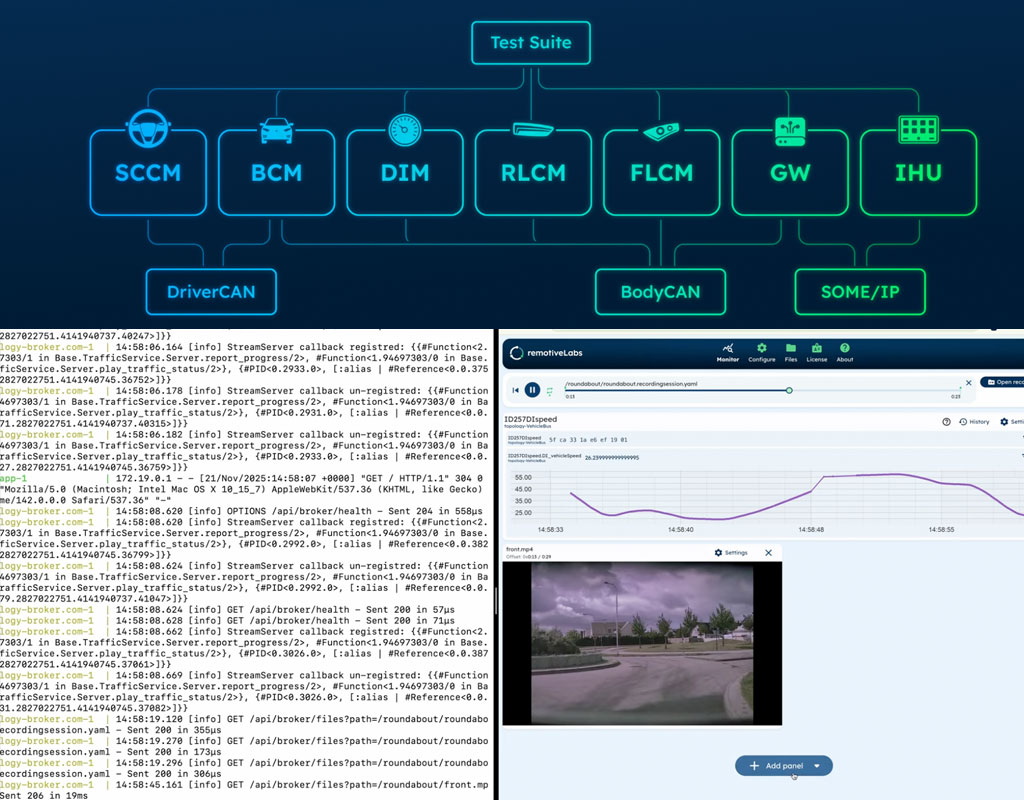
- Instead of replaying a video or a CAN log separately, you view everything in sync inside RemotiveStudio.
- Instead of waiting for hardware availability, you test behaviours and flows immediately.
Candump recordings & ready-to-clone assets
In Episode #3 of our RemotiveTopology Onboarding series on YouTube, Jan Kronquist demonstrates how to run an open-loop simulation using our available Can sample dataset from Tesla. He walks through setup, understanding how the platform and recording session fit together, generating an instance, launching RemotiveStudio, and running synchronised playback of CAN data and video.
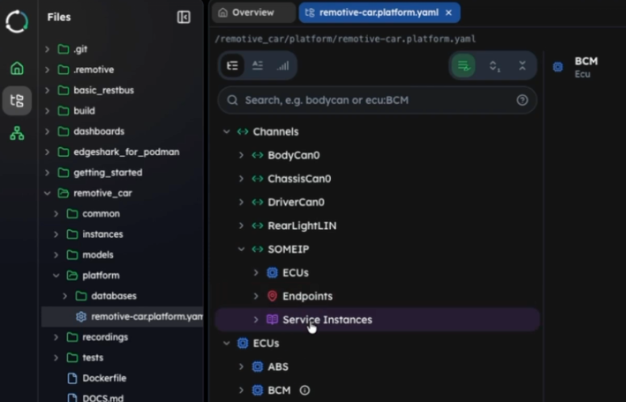
Once the repo is cloned, the process is simple: instantiate a topology from a recording session, generate and start the instance, open RemotiveStudio, and hit play - your virtual vehicle comes to life.
You bring the data. We provide the collaborative environment.
Your recordings (CAN dump, CSV, VSS/VSPEC-based data - additional formats to be added) become the input. Contact us if you require additional format - our backlog depend on user input. For best results in production workflows, we recommend recordings from a vehicle close to the model you’re developing - previous iterations or closely related platforms are often ideal for early simulation.
You also bring your signal database and whichever models suit your use case: Simulink, FMUs, behavioral models, Android Automotive applications or UI prototypes. RemotiveLabs open and developer-centric platform integrates easily with other tooling and workflows, so your preferred methods fit right in.
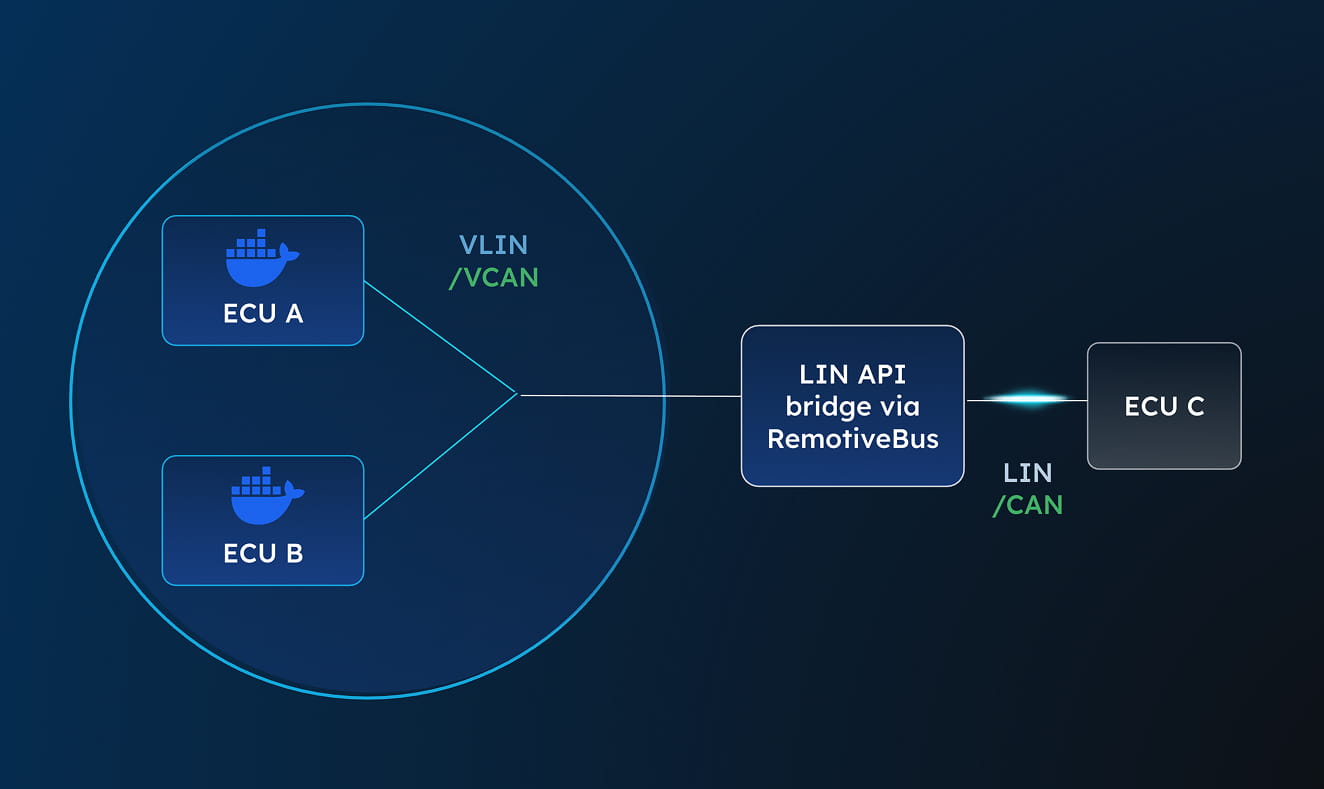
We provide the runtime environment, the channels, and synchronised playback of signals and video. With the implementation of playback in RemotiveTopology the tooling now provides a strong foundation for mixing open- and closed-loop simulation. This includes the ability to mix recorded data with running logic, behavioral models, and live interaction, giving you flexibility across both early exploration and integrated testing.
Check out the latest from us


.jpg)
.jpg)


Join the automotive rebels that #getstuffdone with RemotiveLabs!
